***************************************************************************************************************************************************************************************

![]()

溫馨提示
產品圖片屬性及價格僅供參考,詳情請旺旺或來電咨詢!

![]()
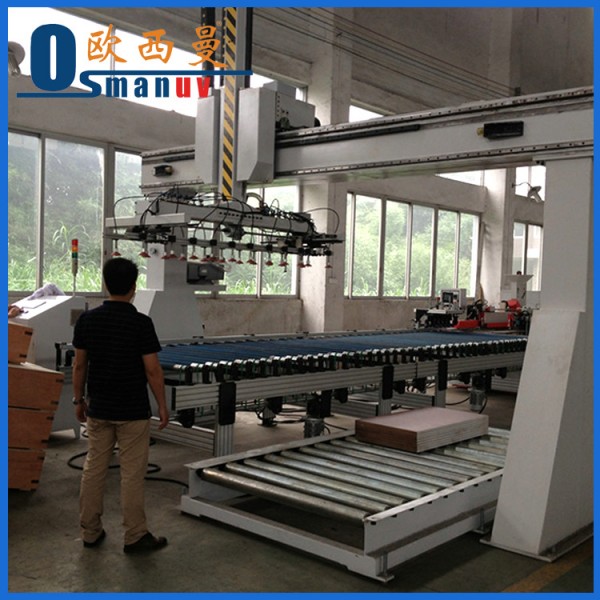
機械手主要由執行機構、驅動機構和控製系統三大部分組成。手部是用來抓持工件(或工具)的部件,根據被抓持物件的形狀、尺寸、重量、材料和作業要求而有多種結構形式,如夾持型、托持型和吸附型等。運動機構,使手部完成各種轉動(擺動)、移動或復合運動來實現規定的動作,改變被抓持物件的位置和姿勢。運動機構的升降、伸縮、旋轉等獨立運動方式,稱為機械手的自由度 。為瞭抓取空間中任意位置和方位的物體,需有6個自由度。自由度是機 械手設計的關 鍵參數。自由 度越多,機械手的靈活性越大,通用性越廣,其結構也越復雜。一般專用機械手有2~3個自由度。控製系統是通過對機械手每個自由度的電機的控製,來完成特定動作。同時接收傳感器反饋的信息,形成穩定的閉環控製。控製系統的核心通常是由單片機或dsp等微控製芯片構成,通過對其編程實現所要功能。
***************************************************************************************************************************************************************************************


批發市場僅提供代購諮詢服務,商品內容為廠商自行維護,若有發現不實、不合適或不正確內容,再請告知我們,查實即會請廠商修改或立即下架,謝謝。