





可實現動平衡G0.4 經過動平衡調整高速刀桿:
一、提高軸承壽命,減少震動;高轉速,高精密切削。
二、無鍵槽適用於高速下使用。
三、精密平衡校正可校正在:G0.4 25000rpm/G0.4 40000rpm.
平 衡機在國外應用已相當普及,專用平衡機的種類很多。我國由於平衡機起步晚,60年代開始研究開發,技術上不但落後於先進國傢,而且某些專用平衡機幾乎是空 白,如風機,電機、木工機械、空調機等專用設備平衡機。對平衡機而言,機械系統是平衡機中最關鍵的部分,它性能好壞直接關系到轉子(工件)平衡精度及工作 效率。隻有針對不同工件設計專用機械系統,才能把轉子振動減少到最低限度。所以本文提出專用動平衡機機械系統的設計,對提高旋轉機械的性能和使用壽命具有重要意義。
2 力學原理
(1)轉子兩麵平衡原理:
設有不平衡量的剛性轉子M繞定軸Z作勻速轉動,如圖1所示,由於轉子是不平衡的,可以分解為由若乾個偏心薄圓盤所組成,各圓盤的重心都不在轉動軸線上,當 轉子勻速旋轉時,各圓盤均產生一個慣性力,即F1、F2·····FN等組成一個空間慣性力系。這些慣性力雖然大小,方向、位置不相同,但它們都通過轉動 軸,都和轉動軸線垂直。
假定轉子的左右兩端麵作為校正麵,將每個慣性力都分解為通過A、B兩點的平行力,如第i個慣性力 分解 ,其中: 作用於A點的端麵上, 作用於B點的端麵上,l為轉子左右兩個端麵的距離,li為第i個慣性力至左端麵的距離。
同樣,把每個慣性力都向左、右兩個端麵分解,按平麵匯交力系,各自得到一個通過匯交點的合力 、 ,即 、 。顯然,這兩個作用在左、右端麵上合力 與 和轉子的所有慣性力是等效的。因此,在左、右兩端麵上進行平衡校正,適當地加重或去重就可以消除RA、RB,使轉子得到平衡。
由此可見,任何一個不平衡剛性轉子都可在兩個與轉軸垂直的平麵上進行平衡校正,這就是剛性轉子兩麵平衡原理,專用動平衡機機械系統設計就是根據這個平衡原理進行設計。
(2)硬支承平衡機機械特性和校正平麵解算[1][2]
硬支承平衡機是七十年代發展起來的新品種,其支承剛度大,故轉子支承系統的固有頻率很高,且遠遠高於平衡轉速,因此轉子支承振幅很小,轉子慣性力可忽略不 計。轉子不平衡量是力形式作用在支承上,隻要測出支承所受力,就能得到不平衡量,然後通過標準轉子加試運轉進行調整,再根據轉子的幾何尺寸,無需啟動機器 就能調整好系統。
轉子和支承系統尺寸已知,左、右兩校正麵的不平衡量為m1r1及m2r2,其對應的離心力,兩軸承處動反力為及 ,這些力都是矢量;若轉子停止旋轉,則這些力皆為零。
硬支承平衡機就是根據動反力 來確定兩校正麵上離心力 與 ,從而確定兩校正麵上的不平衡量。由於是在測量軸承處,而校正是選定的兩校正麵上,它們之間的關系是動力平衡的關系。因些轉子的慣性力可省略不計,故支承反力和不平衡力是平衡。
由此可見,由不平衡量m1r1及m2r2產生的離心力 僅與兩軸承處的動反力 與 和軸承及校正麵位置尺寸A、B、C有關。軸承處動反力通過傳感器測出,各位置尺寸通過鍵盤輸入計算機,由計算機進行平麵分離解算加以調整。
3 專用動平衡機機械結構設計
平衡機機械系統主要由兩大系統組成:驅動系統(它驅動被測轉子(工件)達到所需的平衡轉速)、擺架系統(它支承被平衡工件,並使之在不平衡力作用下產生振動)。
(1)驅動系統
驅動系統:包括電機、傳動裝置(變速裝置)、制動裝置、傳動方式(聯軸節)等。主軸的一端安裝角度盤,用來指示工件不平衡相位。另外主軸上還裝有光電傳 感器,用來產生基準信號。為瞭使被平衡工件達到所需的轉速,首先確定電動機拖動功率及傳遞的轉矩,按傳動元件的尺寸參數,結合被平衡工件的規格、類型,及 平衡精度要求,設計裝卸夾具,確定工件與主軸聯接方式。
總之,驅動系統要保證被平衡工件在測量過程中有穩定的轉速;避免驅動系統零部件在測量過程中,對工件振動特性產生不良影響。
(2)擺架系統
擺架系統:包括軸承(滾輪)、擺架、彈性元件等。軸承與擺架連成一體,通過彈性元件與支承架聯接,工件安裝在兩支承架之間與擺架組成振動系統,旋轉時,由於工件不平衡,在離心力作用下被迫振動,通過傳感器將擺架的振動量轉換為電訊號,輸入測量回路。
在擺架系統的結構設計中,首先要選擇適當的支承方式確定框架的結構形式,以及與之相適應的元件。且又要保證平衡工件要求在平衡機的重量范圍內,擺架應有 一定足夠尺寸的剛度。同時,鑒於要確保平衡機有較高的靈敏度,又要求擺架重量適當。所以擺架系統設計是平衡機結構設計中最關鍵的一個環節。
(3)自由度不平衡轉子振動系統計算
平衡機振動系統的設計計算,是平衡機機械結構設計中心問題,為瞭是平衡振動系統有較好相頻和幅頻特性,以保證平衡測量的穩定性和精度,振動系統應滿足兩 個基本要求[1]。① 在激振力可能達到的范圍內,激振力與位移的關系是線性的。② 振動系統固有頻率 與平衡轉速對應的轉動頻率ω必須符合規定:ω<0.3 。
1)運動方程:
本文以三自由度的機械振動系統為例,其轉子及支承力學模型如圖3所示:轉子運動以系統質點O方向平動,繞質點O在YZ平麵內旋轉和Z軸旋轉。
轉子以角速度ω進行平衡,由於轉子不平衡引起彈性系統一起振動,振動系統隨質心沿Y方向的平動為 ,繞質心YZ平動時的轉動θ。假定轉子質量M,擺架軸系附件質量 ,簧板剛度K,校正平麵的徑向慣性力mrω2轉子在YOZ平麵運動時振動固有頻率
2)簧板剛度
①取值范圍:
硬支承平衡機轉子振動頻率遠遠小於其固有頻率,質心的位移和轉角又很小,質量為M的轉子系統在運動中的慣性力可以略去不計,支承上測得的彈性力近似於m 不平衡量引起徑向力,有一定誤差。為瞭使誤差限制在一定范圍內,設計硬支承平衡機時,應使質量M的慣性力和不平衡量m引起徑向力之比不大於誤差率σ,即:
②簧板厚度:
左右彈性支承采用兩片等厚度的矩形簧板支承,簧板兩端用螺釘分別固連於底板及擺架上
③數據分析
由於篇幅有限制,本文以風機專用為例,給出有些相關數據:
工件(風輪)質量:M=50Kg
擺架軸系附件質量:M’ =35Kg
彈性系統總剛度:2K=119.5Mpa
當平衡轉速n =1200r/min時,轉動頻率:ω=(2πn)/60=125.6 rad/s
誤差率 ≈0.01(當 =0.01時)
4 結 論
(1).按照本文提供相關數據設計制造的專用動平衡機,測量線性好,比一般平衡機工作效率更高,操作更方便、精度更高。
(2).經實踐證明:專用機械系統配SANF-60型微機箱,一次不平衡量減少率URR ≥95%,最小可達剩餘不平衡量emar≤0.3g.mm/kg。
(3).本系統設計對提高旋轉機械性能和使用壽命有很大參考價值,同時也對開發全自動平衡機有一定借鑒作用。
更多詳情請咨詢》》



動平衡機機械系統設計與實現
現場動平衡調整:







更多細節展示說明請點擊》》
聯 系 人:徐垂榮 先生 (業務部 經理)
電 話:86 021 37831736
傳 真:86 021 37831736
地 址:中國 上海市松江區 上海市松江區北松公路6700號(松衛路口)26棟9-12
公司主頁:http://www.xuda4400.cn.alibaba.com
http://xuda4400.1688.com
最新報價請咨詢》》
上 海尺度實業發展有限公司主要以客戶的需求為中心,投入巨資和技術隊伍,專業設計生產各 類超硬硬質合金精密刀具為導向,產品使用范圍廣泛(例如模具、汽車、航空、造船、軍工、冶金、汽輪等行業)。目前我們所經營的精密刀具產品范圍幾乎覆蓋所 有的種類,如鉆頭、槍鉆、鉸刀、絲錐、螺紋量規、螺紋銑刀、鏜刀、車刀、槽刀、鏜刀柄、加工中心刀柄等;另設門市部代理各品牌五金工具,有精密墊片、壓花 輪、對刀機,板牙、拉刀、砂輪、鋸片、工具和量具和機床附件,由於信息靈通,聯系廣泛,故可以為客戶精選質優價廉,交貨期短的品牌。並可按照客戶需求提供 其他品牌刀具或者非標刀具產品,本公司提供的產品已成功受到各行業用戶的廣泛支持和認同。

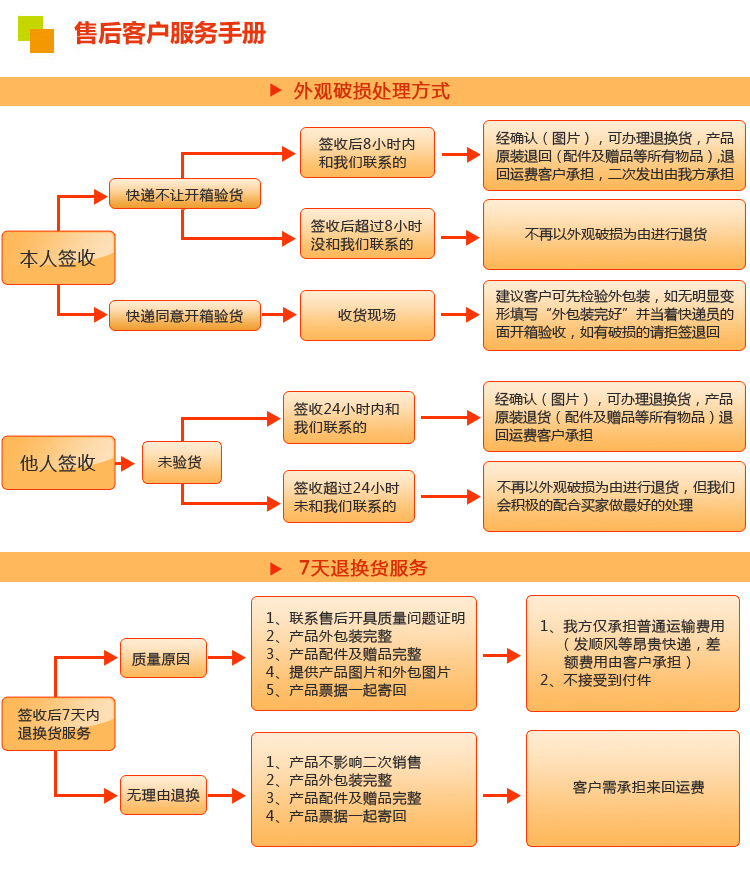

關於售後更多問題請點擊》》


批發市場僅提供代購諮詢服務,商品內容為廠商自行維護,若有發現不實、不合適或不正確內容,再請告知我們,查實即會請廠商修改或立即下架,謝謝。



