




| 品牌 | 旺人旺 |
![1Y~@RXZBX_XHM)(L$N]V%W6](https://cbu01.alicdn.com/img/ibank/2014/905/659/1899956509_1915174348.jpg)

![(~()3951FGN4]6L{([4U]JC](https://cbu01.alicdn.com/img/ibank/2014/405/659/1899956504_1915174348.jpg)





![1Y~@RXZBX_XHM)(L$N]V%W6](https://cbu01.alicdn.com/img/ibank/2014/956/449/1899944659_1915174348.jpg)
![(~()3951FGN4]6L{([4U]JC](https://cbu01.alicdn.com/img/ibank/2014/456/449/1899944654_1915174348.jpg)
有趣好玩的智能循跡小車
隨著素質教育的越來越被重視,很多學校都把製作智能小車作為首選課題,智能小車生動有趣還牽涉到機械結構、電子基礎、傳感器原理、自動控製甚至單片機編程等諸多學科知識,學生通過動手實踐能大大提高解決實際問題的能力,而且智能小車還是一個很好的硬件平臺,隻要增加一些控製電路就能完成循跡小車、救火機器人、足球機器人、避障機器人、遙控汽車等課題。
在白色的場地上有一條16毫米寬的黑色跑道,我們的循跡小車能沿著黑色跑道自動行駛,不管是跑道如何彎曲小車都能自動行駛真是太神奇瞭!大傢知道當光源射到白色物體和黑色物體上時的反光率是不同的,我們這裡用紅色的LED作為光源,光線通過地麵反射到光敏電阻上通過檢測光敏電阻阻值變化能判斷小車是否行駛在白色區域上,如果檢測到是黑色跑道,說明小車跑偏,這一側的電機就會減速甚至停轉這一側的綠色的LED熄滅,驅動小車向相反方向行駛,這樣小車就能始終沿著跑道行駛瞭。
本著從簡到繁的原則,我們首先來製作一款由數字電路來控製的智能循跡小車,在組裝過程中我們不但能熟悉機械原理還能逐步學習到:光電傳感器、電壓比較器、電機驅動電路等相關電子知識。
下麵我們先來熟悉一下三個主要器件:
光敏電阻器件
這就是光敏電阻,它能夠檢測外界光線的強弱,外界光線越強光敏電阻的阻值越小,外界光線越弱阻值越大,當紅色LED光投射到白色區域和黑色跑道時因為反光率的不同,光敏電阻的阻值會發生明顯區別,便於後續電路進行控製。
LM393比較器集成電路
LM393是雙路電壓比較器集成電路,由兩個獨立的精密電壓比較器構成。它的作用是比較兩個輸入電壓,根據兩路輸入電壓的高低改變輸出電壓的高低。輸出有兩種狀態:接近開路或者下拉接近低電平,LM393采用集電療開路輸出,所以必須加上拉電阻才能輸出高電平。
帶減速齒輪的直流電機
直流電機驅動小車的話必須要減速,否則轉速過高的話小車跑得太快根本也來不及控製,而且未經減速的話轉矩太小甚至跑不起來,我們專門定做的這種電機已經集成瞭減速齒輪大大降低瞭製作難度非常適合我們使用。
首先我們來熟悉一下整機的工作原理圖,LM393隨時比較著兩路光敏電阻的大小,當出現不平衡時(例如一側壓黑色跑道)立即控製一側電機停轉,另一側電機加速旋轉,從而使小車修正方向,恢復到正確的方向上,整個過程是一個閉環控製,因此能快速靈敏地控製。
組裝步驟:
第一步:電路部分基本焊接
電路焊接部分比較簡單,焊接順序按照元件高度從低到高的原則,首先焊接8個電阻,焊接時務必用萬用表確認阻值是否正確,焊接有極性的元件如三極管、綠色指示燈、電解電容務必分清楚極性盡量參考我們圖片的元件方向焊接,焊接電容時引腳短的是負極插入PCB絲印上陰影的一側,焊接綠色LED時註意引腳長的是正極,並且焊接時間不能太長否則容易焊壞,D4 D5 R13 R14 可以暫時不焊,集成電路芯片可以不插,初步焊接完成後請務必細心核對,防止粗心大意。
第二步:機械組裝
將萬向輪螺絲穿入PCB孔中,並旋入萬向輪螺母和萬向輪。電池盒通過雙麵膠貼在PCB上,引出線穿過PCB預留孔焊接到PCB上,紅線接3V正電源,黃線接地,多餘的引線可以用於電機連線。
機械部分組裝可以先組裝輪子,輪子由三片黑色亞克力輪片組成,裝配前請將保護膜揭去,最內側的輪片中心孔是長園孔,中間的輪片直徑比較小,外側的輪片中心孔是園的,用兩個螺絲螺母固定好三片輪片,並用黑色的自攻螺絲固定在電機的轉軸上,最後將矽膠輪胎套在車輪上。用引線連接好電機引線,最後將車輪組件用不乾膠粘貼在PCB製定位置,註意車輪和PCB邊緣保持足夠的間隙,將電機引線焊接到PCB上,註意引線適當留長一些,防止電機旋轉方向錯誤後便於調換引線的順序。
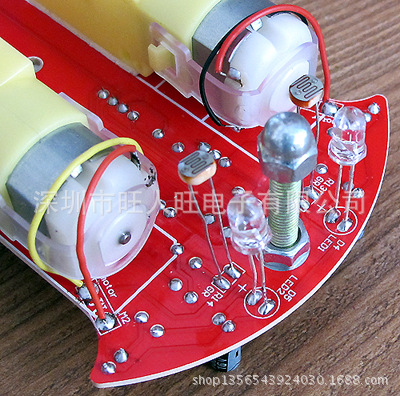
第三步:安裝光電回路
光敏電阻和發光二極管(註意極性)是反向安裝在PCB上的,和地麵間距約5毫米左右,光敏電阻和發光二極管之間距離也在5毫米左右。最後可以通電測試,
第四步:整車調試
在電池盒內裝入2節AA電池,開關撥在“ON”位置上,小車正確的行駛反相是沿萬向輪方向行駛,如果按住左邊的光敏電阻,小車的右側的車輪應該轉動,按住右邊的光敏電阻,小車的左側的車輪應該轉動,如果小車後退行駛可以同時交換兩個電機的接線,如果一側正常另一側後退,隻要交換後退一側電機接線即可。
註意事項:
組裝說明書的背麵就是循跡小車的簡易跑道,客戶也可以直接用1.5~2.0厘米黑色的電工膠帶直接粘貼在地麵上設計成復雜的跑道就更好玩瞭
阿裡巴巴誠信通網址:http://shop1356543924030.cn.alibaba.com
淘寶網址:http://wrw108.taobao.com 公司網址http://wrw108.com


批發市場僅提供代購諮詢服務,商品內容為廠商自行維護,若有發現不實、不合適或不正確內容,再請告知我們,查實即會請廠商修改或立即下架,謝謝。



