




火焰傳感器的原理
- 火焰傳感器能夠探測到波長在700納米~1000納米范圍內的紅外光,探測角度為60,其中紅外光波長在880納米附近時候的靈敏度達到最大。遠紅外火焰探頭將外界紅外光的強弱變化轉化為電流的變化,通過A/D轉換器反映為0~255范圍內數值的變化。外界紅外光越強,數值越小;反之則越大。
火焰傳感器的功能說明
- 火焰傳感器最早是機器人專門用來搜尋火源的傳感器,當然火焰傳感器也可以用來檢測光線的亮度,隻是本傳感器對火焰特別靈敏。火焰傳感器利用紅外線對對火焰非常敏感的特點,使用特制的紅外線接受管來檢測火焰,然後把火焰的亮度轉化為高低變化的電平信號,輸入到中央處理器中,中央處理器根據信號的變化做出相應的程序處理。
火焰傳感器的應用
- 火焰傳感器主要應用於火災消防系統,尤其是一些易燃易爆場所,用來檢測火焰的產生。同時,該傳感器也可以用於發動機、鍋爐、窯爐等的火焰報警系統
火焰傳感器
flame transducer火焰是由各種燃燒生成物、中間物、高溫氣體、碳氫物質以及無機物質為主體的高溫固體微粒構成的。火焰的熱輻射具有離散光譜的氣體輻射和連續光譜的固體輻射。不同燃燒物的火焰輻射強度、波長分佈有所差異,但總體來說,其對應火焰溫度的1~2 μ m近紅外波長域具有最大的輻射強度。例如汽油燃燒時的火焰輻射強度的波長……
功能說明
火焰傳感器是機器人專門用來搜尋火源的傳感器,當然火焰傳感器也可以用來檢測光線的亮度,隻是本傳感器對火焰特別靈敏。火焰傳感器利用紅外線對對火焰非常敏感的特點,使用特制的紅外線接受管來檢測火焰,然後把火焰的亮度轉化為高低變化的電平信號,輸入到中央處理器中,中央處理器根據信號的變化做出相應的程序處理。
遠紅外火焰傳感器
功能用途:遠紅外火焰傳感器可以用來探測火源或其它一些波長在700納米~1000納米范圍內的熱源。在機器人比賽中,遠紅外火焰探頭起著非常重要的作用,它可以用作機器人的眼睛來尋找火源或足球。利用它可以制作滅火機器人、足球機器人等。
原理介紹:遠紅外火焰傳感器能夠探測到波長在700納米~1000納米范圍內的紅外光,探測角度為60,其中紅外光波長在880納米附近時,其靈敏度達到最大。遠紅外火焰探頭將外界紅外光的強弱變化轉化為電流的變化,通過A/D轉換器反映為0~255范圍內數值的變化。外界紅外光越強,數值越小;紅外光越弱,數值越大。
使用說明:
遠紅外火焰傳感器的安裝如下圖所示,安裝使用時註意以下幾點:
a,將機器人上光敏傳感器取下,然後將遠紅外火焰傳感器直接接在光敏接口上。
b,遠紅外火焰傳感器的插針是有極性的,安裝時將紅線接在主板上畫有“+”的位置;如在使用時無反應,隻要將傳感器反插就可以瞭。
c,在圖形化編程時,直接用“亮度檢測模塊”控制;在代碼框編程時,使用函數photo(1)和photo(2)檢測。
d,遠紅外火焰探頭的工作溫度為-25攝氏度~85攝氏度,在使用過程中應註意火焰探頭離火焰的距離不能太近,以免造成損壞。
紅外線測距傳感器工作原理:
紅外測距傳感器利用紅外信號遇到障礙物距離的不同反射的強度也不同的原理,進行障礙物遠近的檢測。紅外測距傳感器具有一對紅外信號發射與接收二極管,發射管發射特定頻率的紅外信號,接收管接收這種頻率的紅外信號,當紅外的檢測方向遇到障礙物時,紅外信號反射回來被接收管接收,經過處理之後,通過數字傳感器接口返回到機器人主機,機器人即可利用紅外的返回信號來識別周圍環境的變
2.3.1紅外測距傳感器:
紅外避障傳感器(以下簡稱紅外)。紅外具有一對紅外信號發射與接收二極管,發射管發射一定頻率的紅外信號,接收管接收這種頻率的紅外信號,當紅外的檢測方向遇到障礙物(反射麵)時,紅外信號反射回來被接收管接收,經過處理之後,通過數字傳感器接口返回到機器人主機,機器人即可利用紅外波的返回信號來識別周圍環境的變化。
根據比賽要求使用紅外發出與接受傳感器進行距離測量,根據車體前方位於左右兩邊的兩個紅外傳感器接收紅外光輸出電壓不同比較來判斷球的方位指導車體前進方向,以及車體與墻壁之間的距離。
該紅外接收器由一隻光電三極管構成,其電路圖如下:
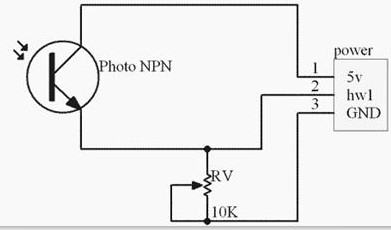
紅外接收器電路圖
當光電三極管接收到紅外線信號時,其電阻減小,在管兩端的電壓分壓減小,輸出口電壓上升,輸入到AD轉換芯片進行轉換。
可以啊,你要看它的距離比是多少啊!
距離系數是紅外測溫機的一個重要參數。
距離系數由D:S之比確定,即測溫機探頭到目標之間的距離D與被測目標直徑之比。如果測溫機由於環境條件限制必須安裝在遠離目標之處,而又要測量小的目標,就應選擇高光學分辨率的測溫機。光學分辨率越高,即增大D:S比值,測溫機的成本也越高。如果測溫機遠離目標,而目標又小,就應選擇高距離系數的測溫機。對於固定焦距的測溫機,在光學系統焦點處為光斑最小位置,近於和遠於焦點位置光斑都會增大,存在兩個距離系數。因此,為瞭能在接近和遠離焦點的距離上準確測溫,被測目標尺寸應大於焦點處光斑尺寸;變焦測溫機有一個最小焦點位置,可根據到目標的距離進行調節。增大D:S,接收的能量就減少,如不增大接收口徑,距離系數D:S很難做大,這就要增加機器成本
外測距傳感器GP2Y0A02YKOF可以測量一定范圍角度內的物體嗎?若能,測量角度是多少?
百度百科上說,測程一般為1-5公裡
但是還有些是用於精密測量的,量程很小,但精度高
利用的是紅外線傳播時的不擴散原理因為紅外線在穿越其它物質時折射率很小所以長距離的測距機都會考慮紅外線而紅外線的傳播是需要時間的當紅外線從測距機發出碰到反射物被反射回來被測距機接受到再根據紅外線從發出到被接受到的時間及紅外線的傳播速度就可以算出距離 美國Bushnell紅外線測距機 現在市麵上的測距機主要分為三類:激光測距機、超音波測距機、紅外測距機,我們介紹對測距機原理的分析也主要介紹這三種。 1.激光測距機 激光測距機是利用激光對目標的距離進行準確測定的機器。激光測距機在工作時向目標射出一束很細的激光,由光電元件接收目標反射的激光束,計時器測定激光束從發射到接收的時間,計算出從觀測者到目標的距離。 激光測距機是目前使用最為廣泛的測距機,激光測距機又可以分類為手持式激光測距機(測量距離0-300米),望遠鏡激光測距機(測量距離500-3000米)。 2.超音波測距機 超音波測距機是根據超音波遇到障礙物反射回來的特性進行測量的。超音波發射器向某一方向發射超音波,在發射同時開始計時,超音波在空氣中傳播,途中碰到障礙物就立即返回來,超音波接收器收到反射波就立即中斷停止計時。通過不斷檢測產生波發射後遇到障礙物所反射的回波,從而測出發射超音波和接收到回波的時間差T,然後求出距離L。 超音波測距機,由於超音波受周圍環境影響較大,所以一般測量距離比較短,測量精度比較低。目前使用范圍不是很廣闊,但價格比較低,一般幾百元左右。 3.紅外測距機 用調制的紅外光進行精密測距的機器,測程一般為1-5公裡。利用的是紅外線傳播時的不擴散原理:因為紅外線在穿越其它物質時折射率很小,所以長距離的測距機都會考慮紅外線,而紅外線的傳播是需要時間的,當紅外線從測距機發出碰到反射物被反射回來被測距機接受到再根據紅外線從發出到被接受到的時間及紅外線的傳播速度就可以算出距離 紅外測距的優點是便宜,易制,安全,缺點是精度低,距離近,方向性差。


批發市場僅提供代購諮詢服務,商品內容為廠商自行維護,若有發現不實、不合適或不正確內容,再請告知我們,查實即會請廠商修改或立即下架,謝謝。




