




| 品牌 | 56電子 |
驚喜的科技製作!從今天開始,你也可以成為科學傢!趕快行動吧!體驗製作樂趣!駕馭探月機器人!
教育機器人、自由行走簡易機器人
本產品是根據全國機器人行走比賽開發的(看停的位置和標準線的差距來評分)
功能;前進和停止
包裝尺寸;112*81*216mm
裝配說明文檔:http://www.56dz.com/ptzl/show/921.html
1、本機器人是順應科技進步新開發的教育機器人教學套件,它具有電路精簡、實用、可學習性強之外還具有趣味性強等特點,是一款娛教於樂的教學散件。
2、裝配好的機器人可以前進、後退、發聲、閃眼睛等動作。
3、調節電路中的元件參數(電位器)可以控製機器人行走的時間及距離。此處可以鍛煉學生如何準確控製機器人行走路程長短,2011年某市機器人大賽就是設定目的地,讓選手通過控製機器人準確準點到達。
4、機器人套件實物圖片展示:

電路板及元件
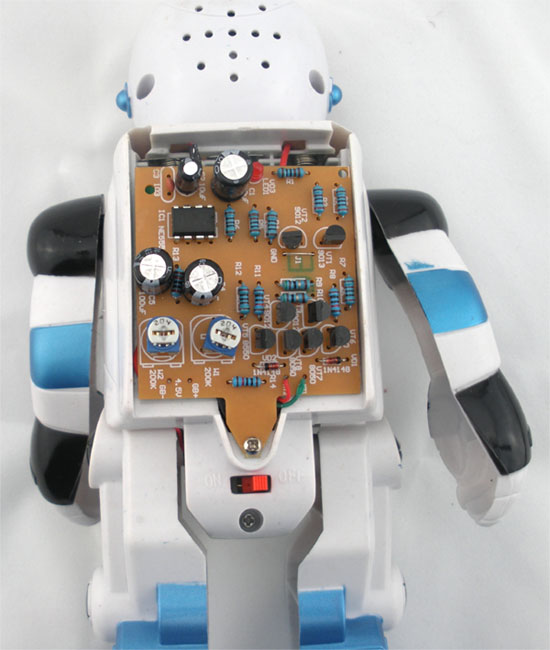
配套的說明指導書
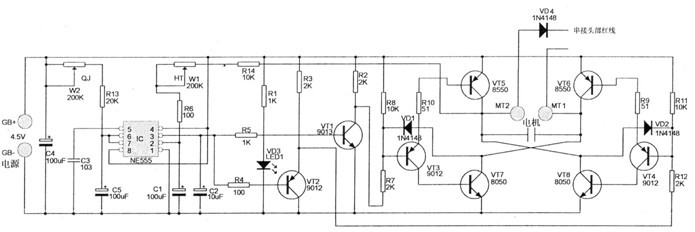
一、簡單原理
本電路的集成塊采用NE555時基電路,內部由比較器、RS觸發器、放電管等部分組成,如圖6腳R端的正相輸入端和7腳放電端連在一起為RS觸發器翻轉做瞭準備。2腳是S端的反相輸入端,3腳是輸出端。初始狀態時RS觸發器的Q端輸出低電平放電管截止不放電,3腳輸出高電平。此時W2、R13、C5構成正穩態的延時電路,電源通過W2、R13對C5充電(調節W2可以調節C5達到觸發電平的時間)當C5端的電壓達到2/3VCC時,R端比較器翻轉輸出高電平。此時S端電平基本不變從而致使RS觸發器觸發翻轉進入另一個穩態,Q端輸出高電平,放電管導通C5的電壓瞬間被拉為低電平。因在正穩態時MT2端為高電平對C1充滿瞭電,2腳一直處於高電平,當RS觸發器觸發翻轉進入另一個穩態後MT2變為低電平,此時C1通過W1、R6、R14對地放電,調節W1可以調節放電的時間,當C1端的電壓降到1/3VCC時S端比較器翻轉致使RS觸發器進入正穩態,依次循環,分別調節W2、W1可以控製正、負穩態電路的延時長短。3腳是正、負穩態的輸出端,正、負穩態分別輸出正、負電平。該電平加到電容C2上給C2充電使輸出電平穩定,該電平就是後麵驅動電路的控製信號。該控製信號經R5加到9013的基極,9013是NPN管,基極正電平時9013的C、E極導通,而9012截止,也即是正穩態時9013導通,9013集電療被拉為低電平,再經過R7加到VT3-VT2的基極VT3導通,從而VT5、VT7導通,電流通過MT2經過電機後流經MT1。電機正轉機器人向前行走、發聲,閃眼睛。W2控製電機正轉的時間。當555處於負穩態時輸出低電平,通過R4加到VT2上,VT2、VT4、VT6、VT8導通。電流通過MT1經過電機後流經MT2。電機反轉機器人後退,由於發聲、閃燈電路經過一隻二極管供電,正轉時有電壓,反轉時二極管截止,發聲、閃燈電路無電壓停止工作。


批發市場僅提供代購諮詢服務,商品內容為廠商自行維護,若有發現不實、不合適或不正確內容,再請告知我們,查實即會請廠商修改或立即下架,謝謝。




